Other function description
Before we get into it, let me explain what will help you understand the behind the scenes once you know it.
IMU : Rotation angle value output from inertial sensor
Angle : Output the angle value of robot heading using robot coordinates and inertial sensor data
Map File : Designate the file name of the map to be saved, save location is <.ros> in the home
WP File : Edit route point storage file name
Cycle : number of scheduling repetitions
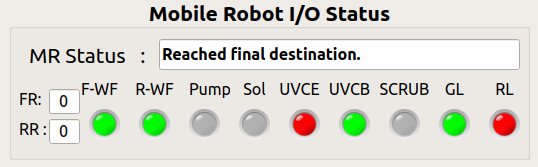
MR Status : Output of the current operating status of the robot
FR : front safety laser detection area selection number
RR : rear safety laser detection area selection number
F-WF : Front safety area detection operation status
R-WF : Rear safety area detection operation status
Pump : Pump operation status
Sol : Solenoid valve operation status
UVCE : Operating state of the ultraviolet lamp at the end of the robot
UVCB : Operating state of the UV lamp at the bottom of the robot
SCRUB : scrubber operation status
GL : Green laser operation status
RL : Red laser operation status
Charg. : Automatic charger parking status output
Navi : Indicates robot autonomous driving status (Blue, Green, Red)
Estop: emergency stop state (Red)
Message Box : Outputs various messages related to robot operation, driving, and control
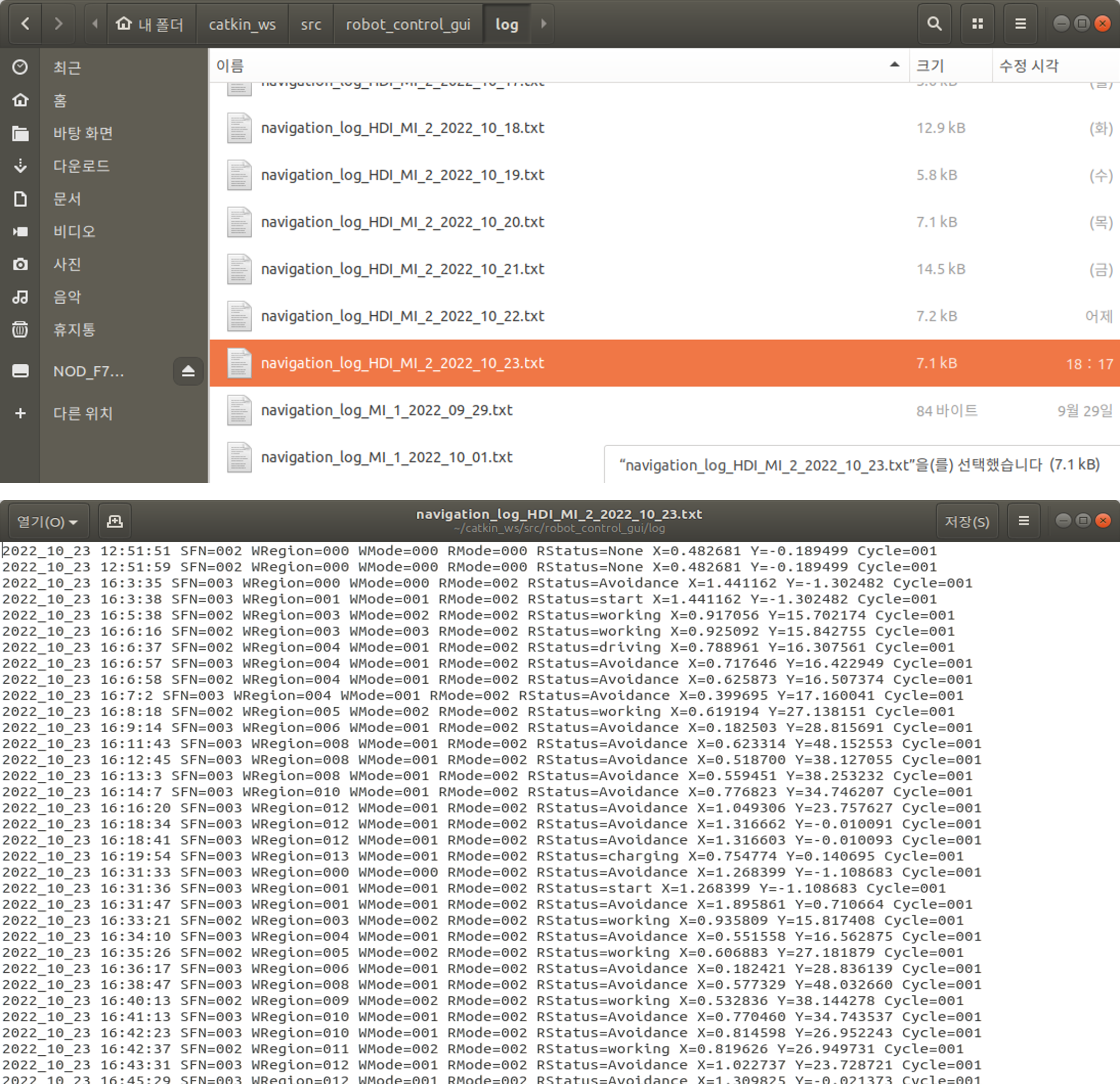
Log file storage location : /home/zetabank/catkin_ws/src/robot_control_gui/log