Navigate Trajectories
Driving by selecting a pre-registered trajectory from the drop-down menu
Desired coordinates are registered in trajectories, and it travels through these coordinates in order.
GUI & Terminal execution screen when button is clicked
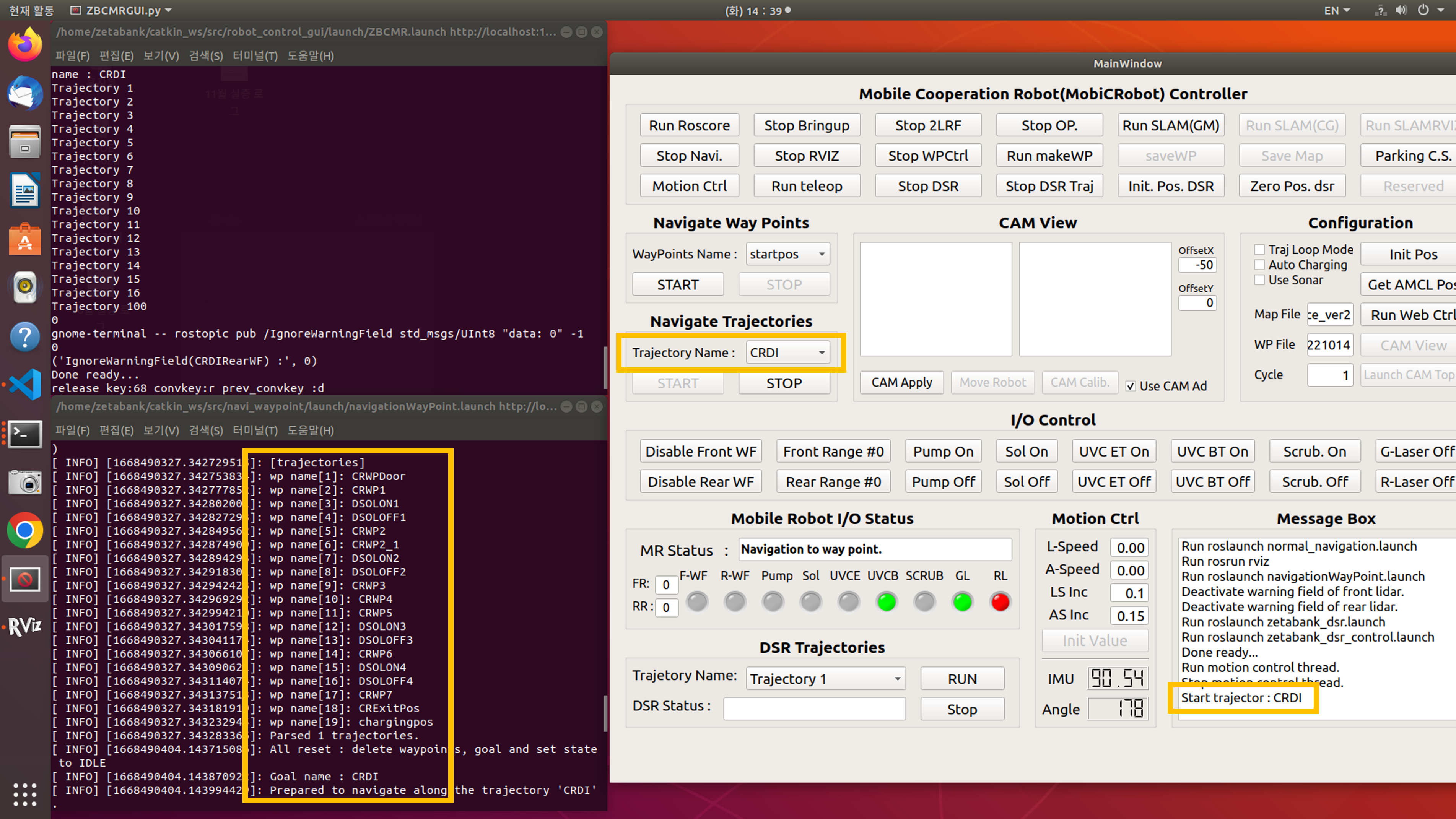
The name of the selected trajectory and the name of the waypoint belonging to the trajectory are displayed.
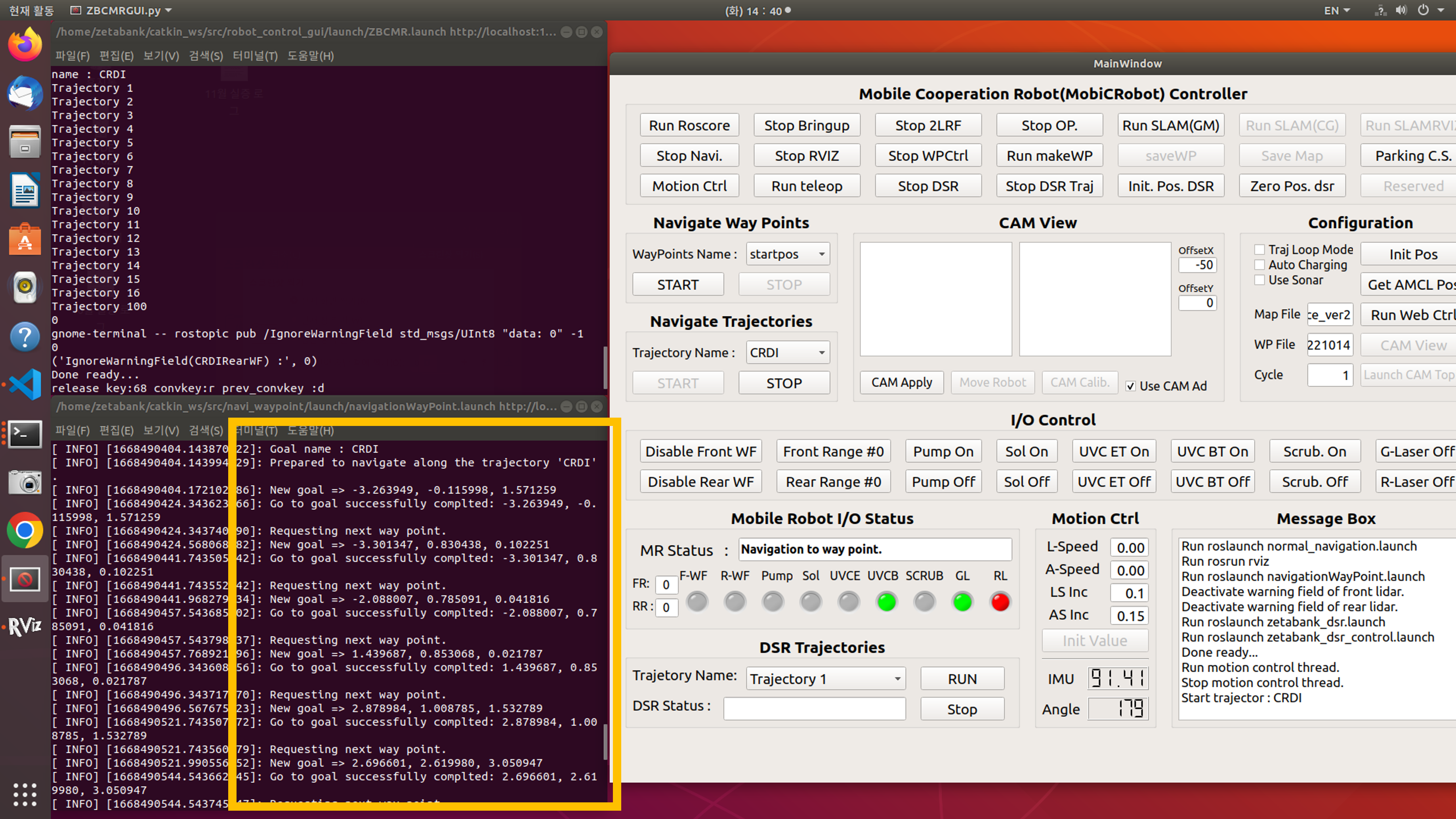
When arriving at a certain waypoint, the coordinates of the next destination are displayed.
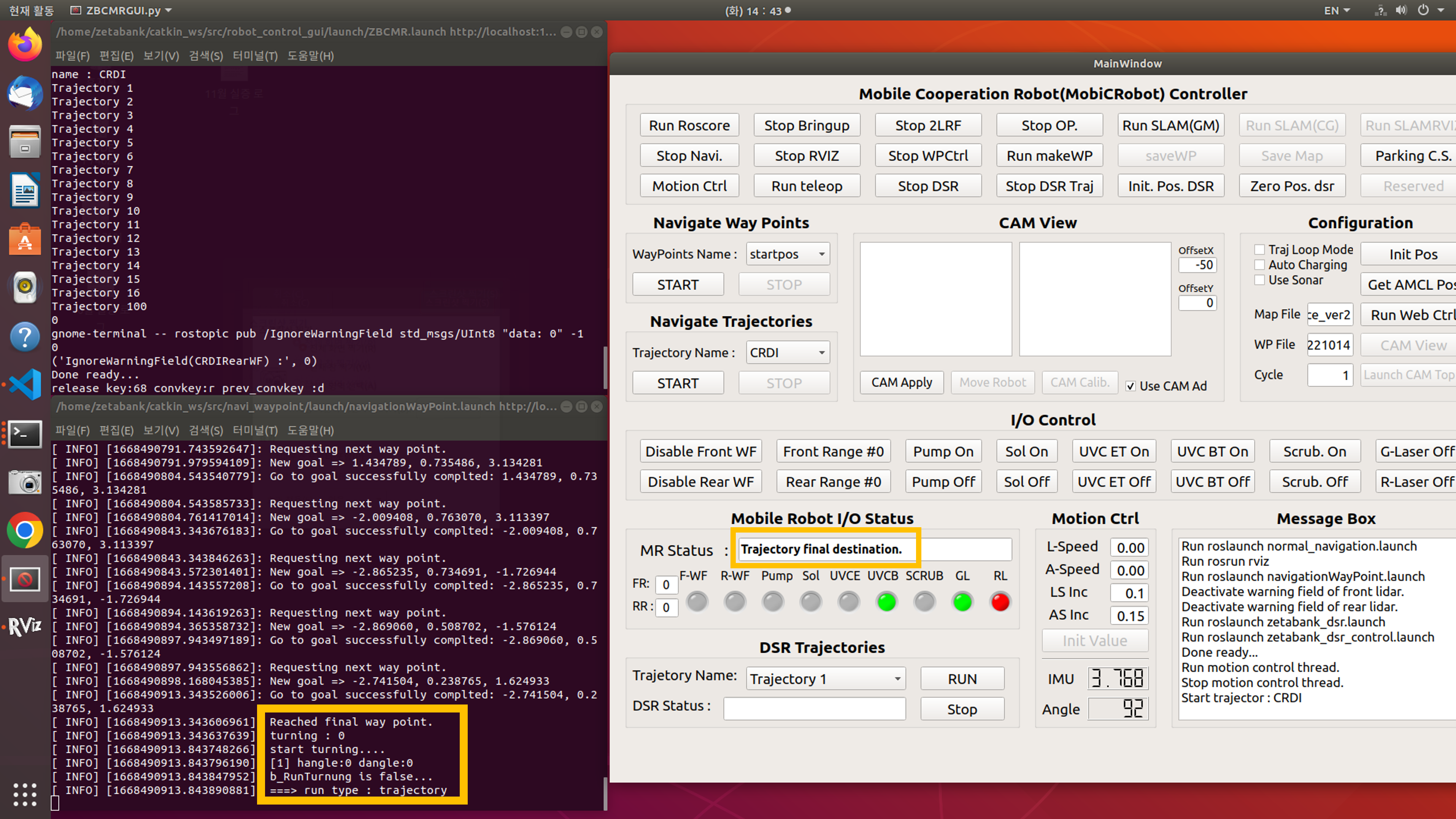
When arriving at the final destination, Trajectory final destination phrase is displayed on MR Status and Navigation Trajectories function is terminated.