Init. Pos. & Zero Pos.
Used to initialize joint positions
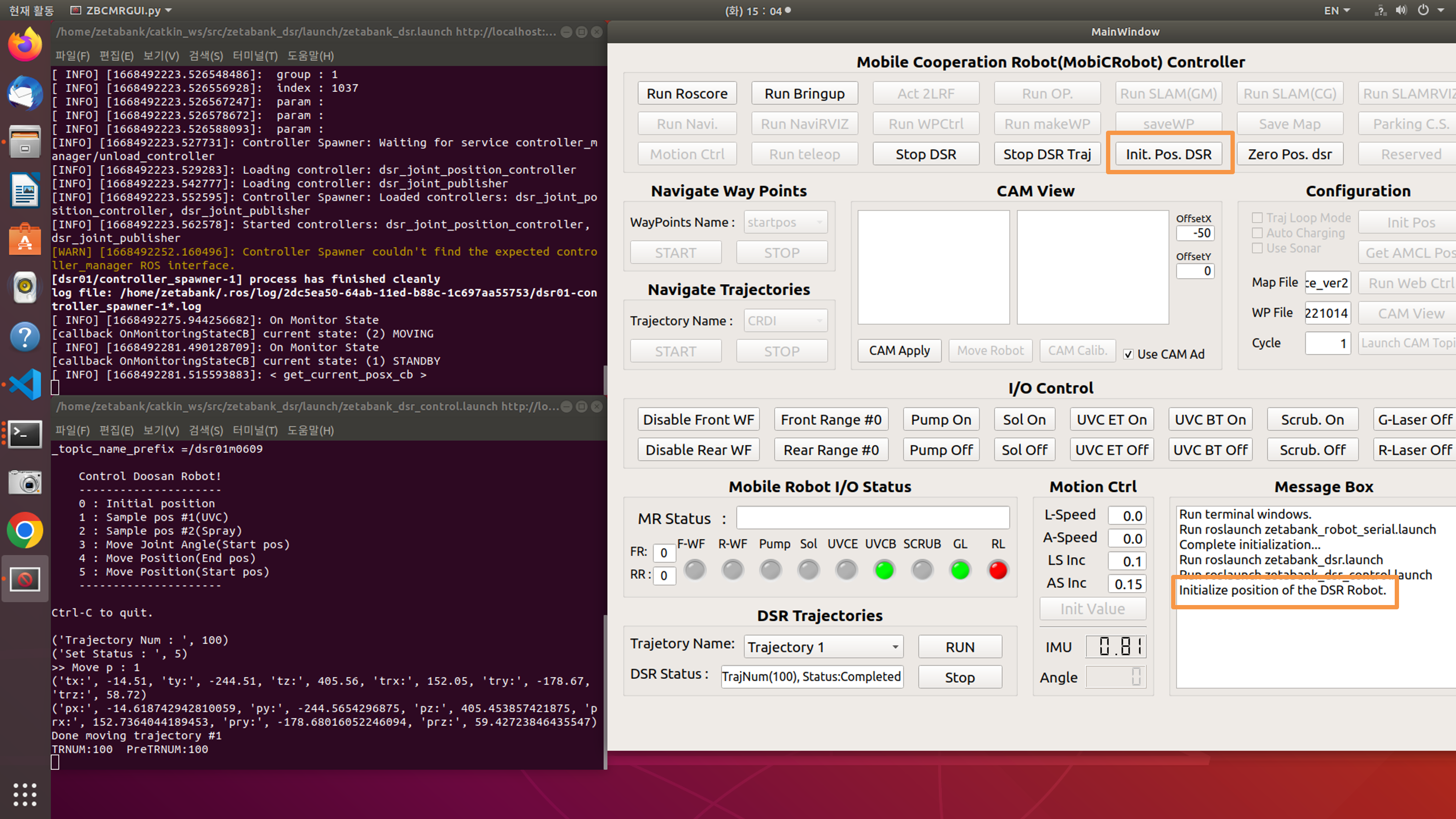
Init. Pos. DSR
Move to the set initial position
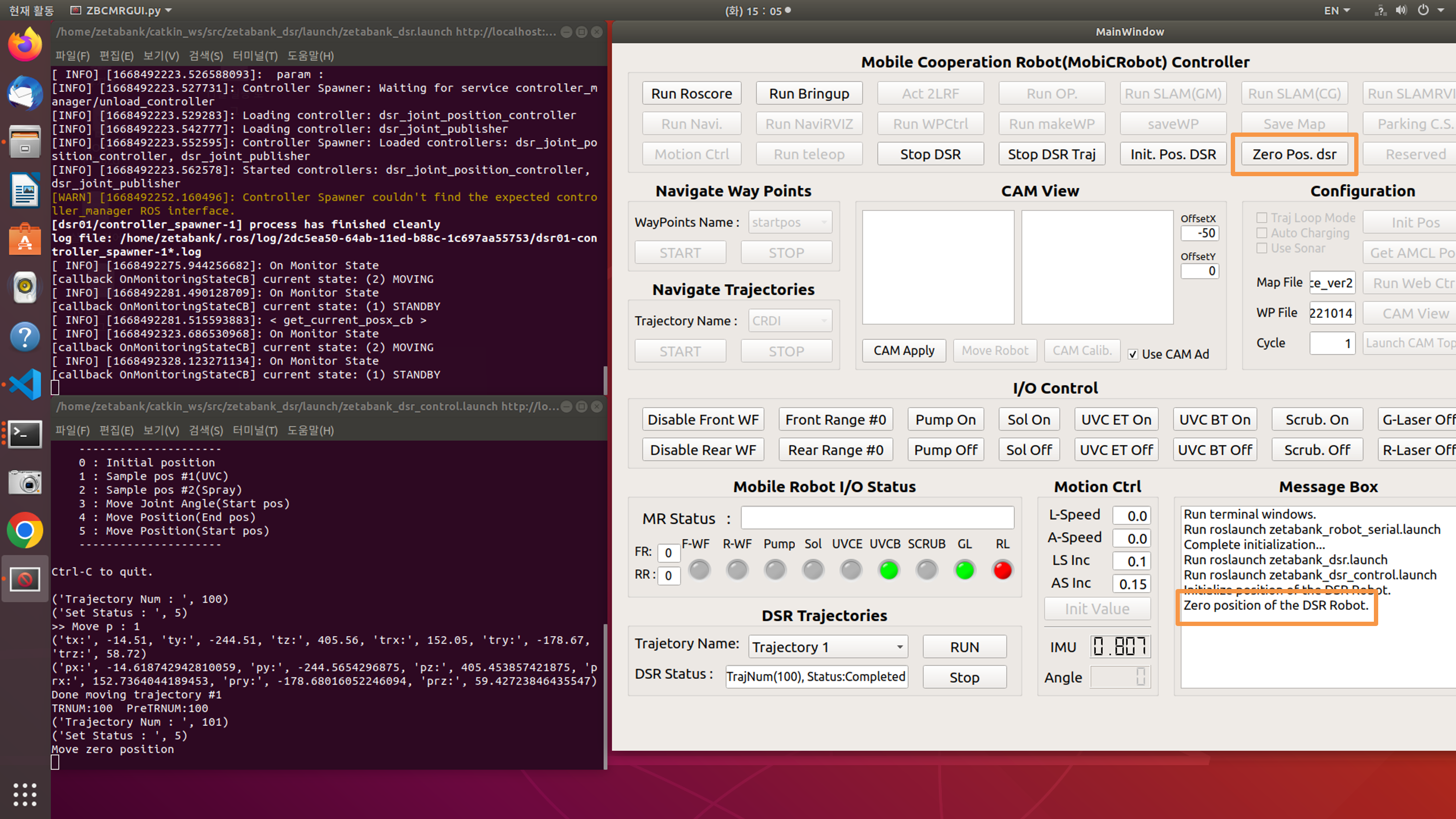
Zero Pos. DSR
Move all joints to ‘0’

Used to initialize joint positions
Init. Pos. DSR
Move to the set initial position
Zero Pos. DSR
Move all joints to ‘0’