Moving Robot Arm
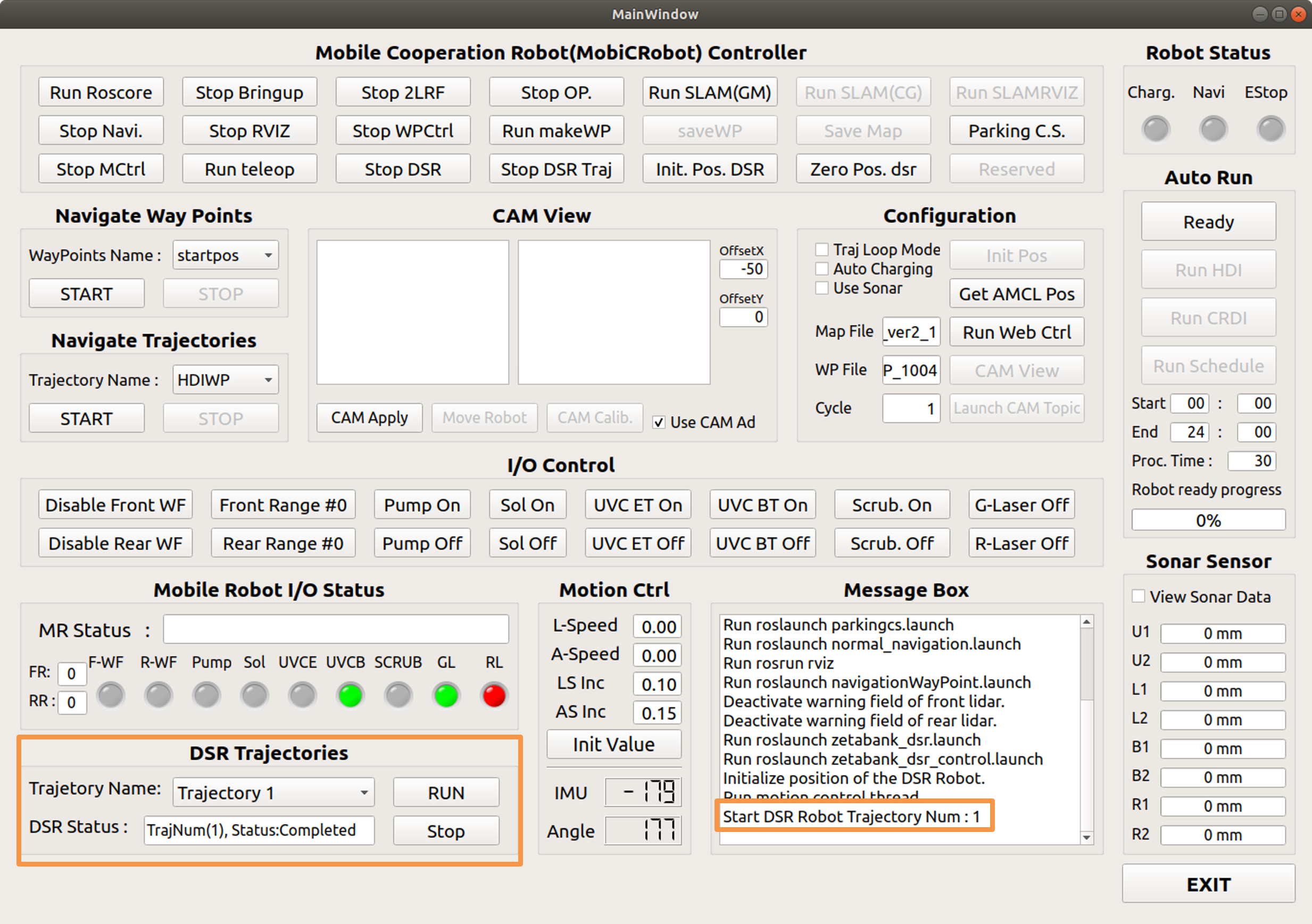
In Trajectory Name, click the drop-down button to select the trajectory and click the “RUN” button
GUI execution screen when button is clicked
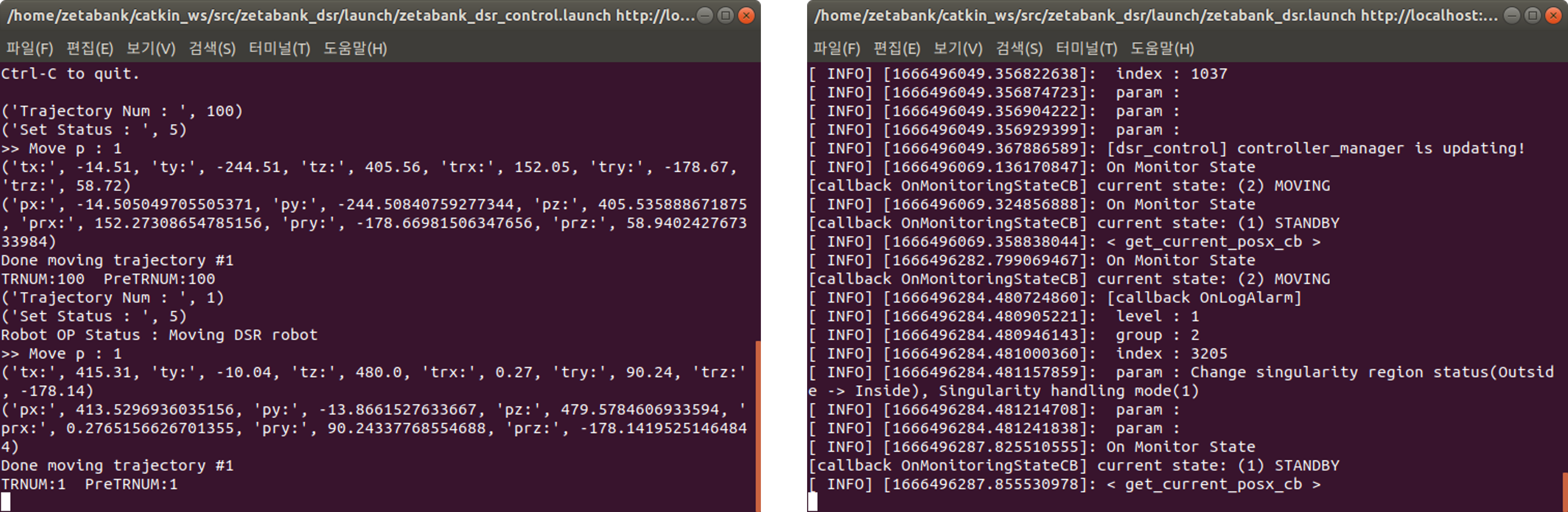
Terminal execution screen when button is clicked
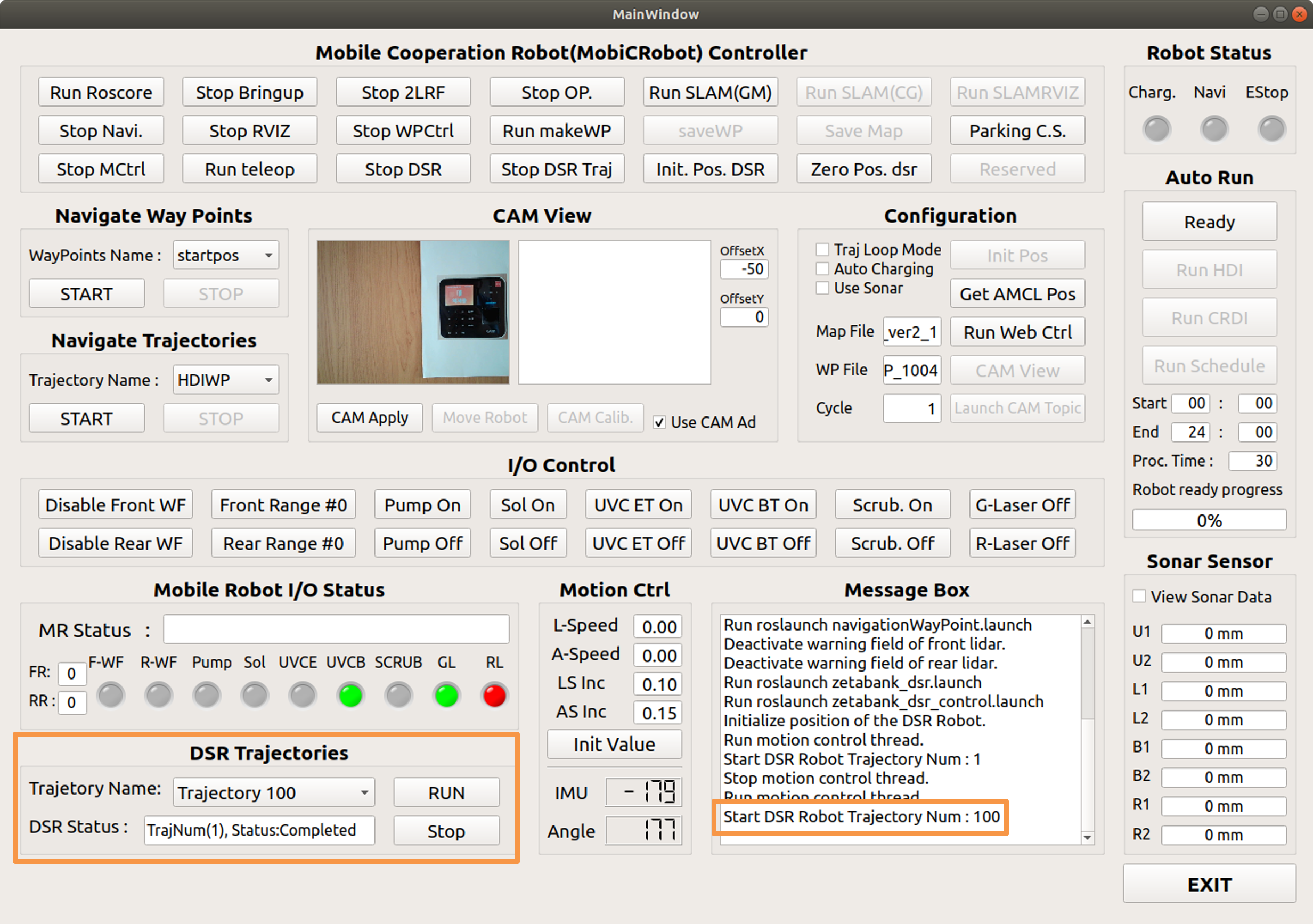
In Trajectory Name, click the drop-down button to select the trajectory and click the “RUN” button
GUI execution screen when button is clicked
Terminal execution screen when button is clicked