NaviRVIZ
Robot autonomous driving simulator
Screen output program
GUI execution screen when button is clicked


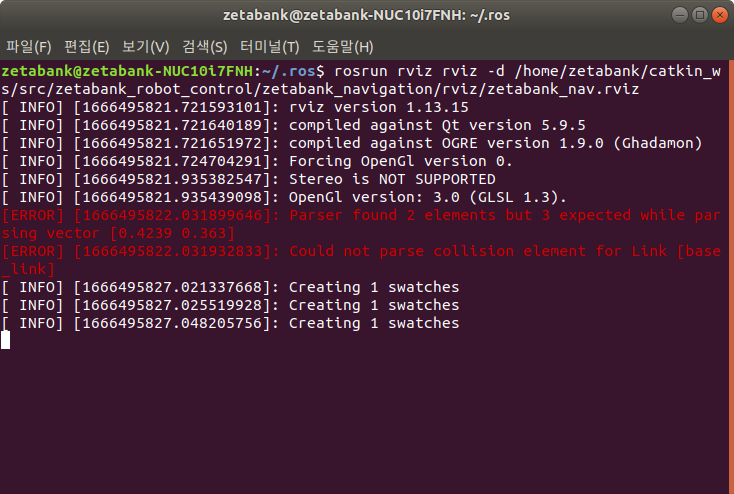
Terminal execution screen when button is clicked
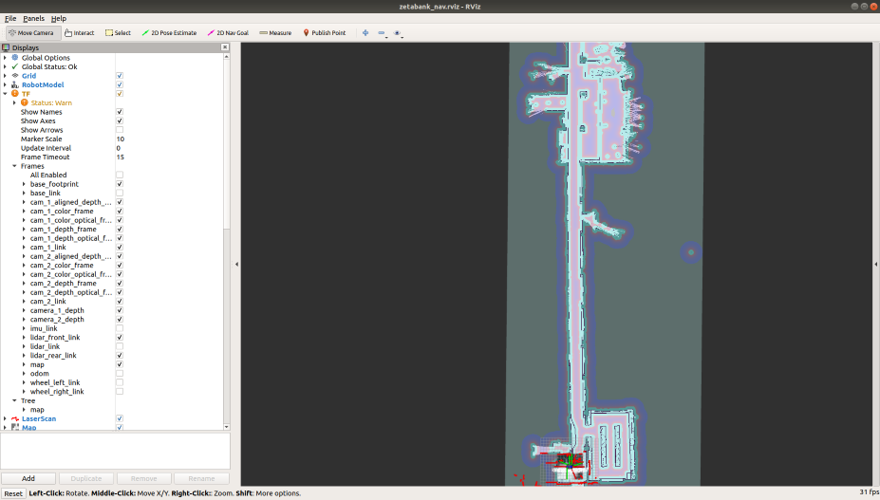
RVIZ execution screen when button is clicked
It outputs maps, distance measurement sensor data, global/regional driving routes, and various robot statuses.