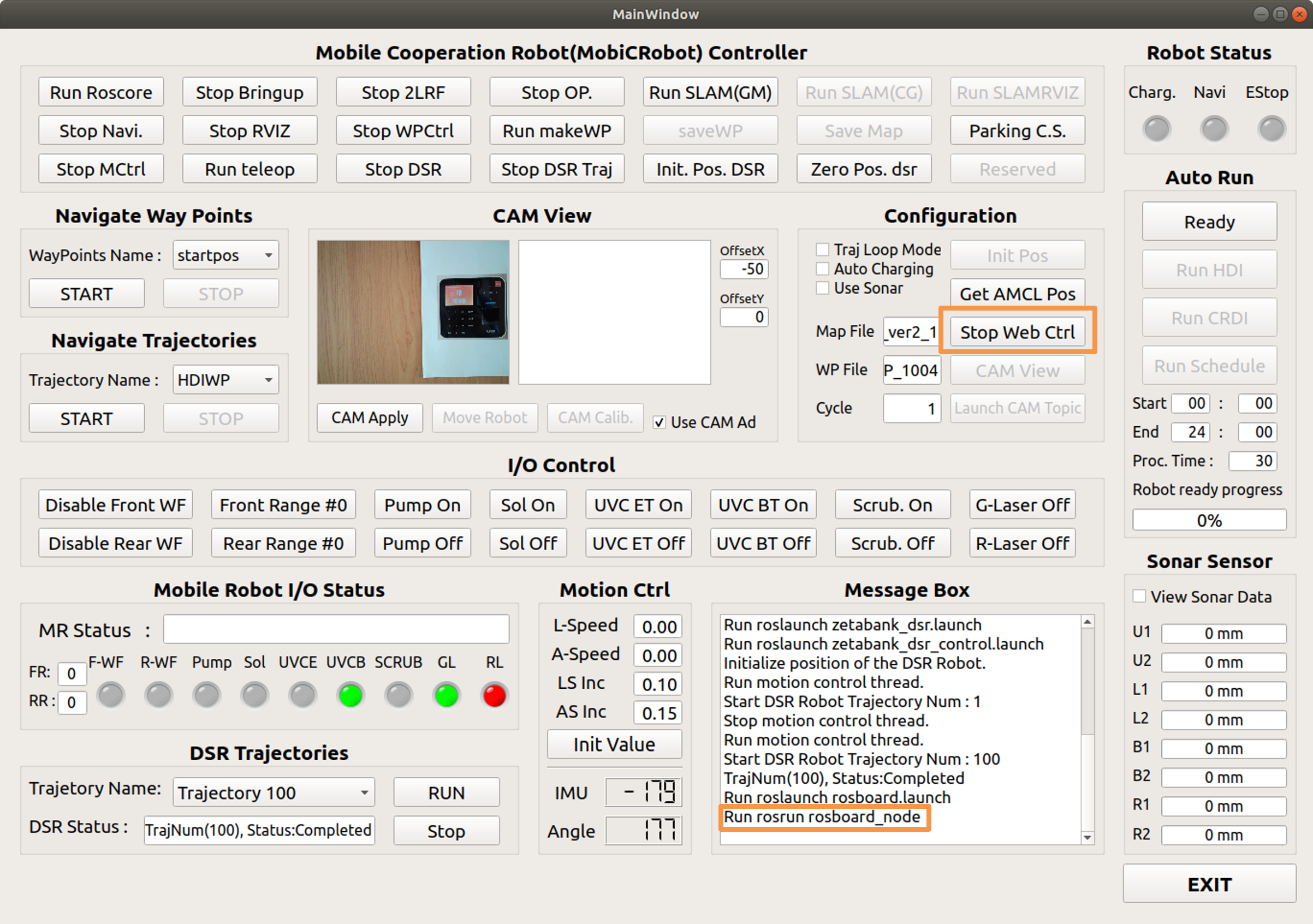
RosBoard
Web-based ROS topic and robot control program execution
GUI execution screen when button is clicked

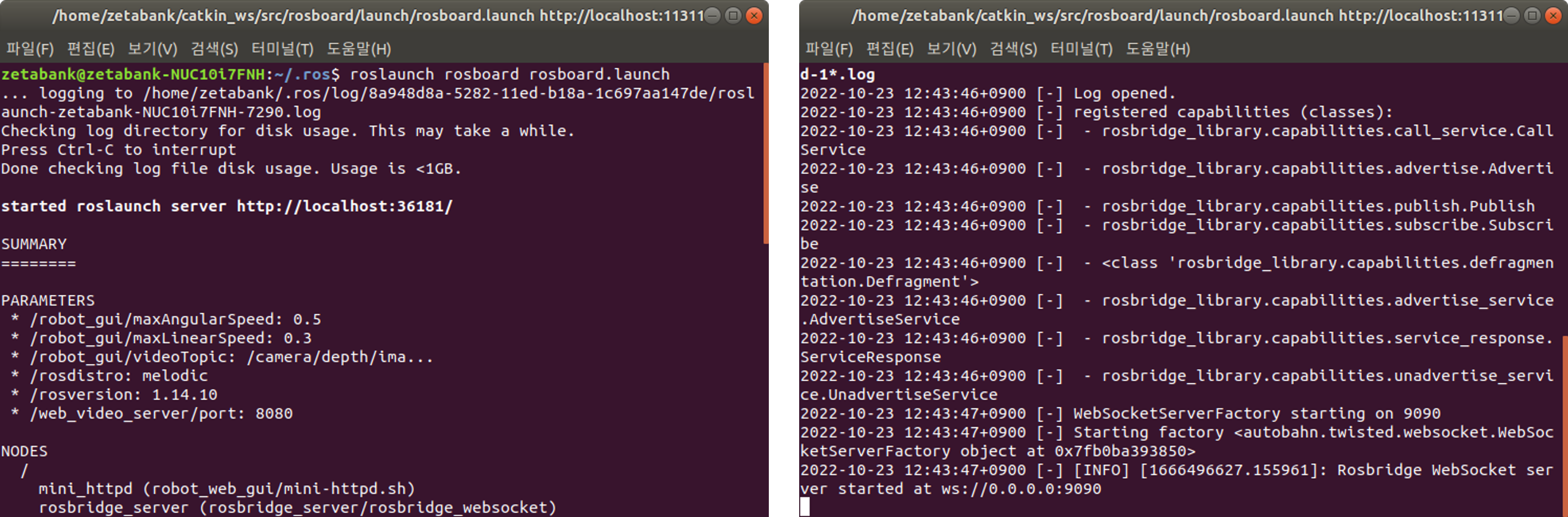
Terminal execution screen when button is clicked
Launch web browser
Robot remote control
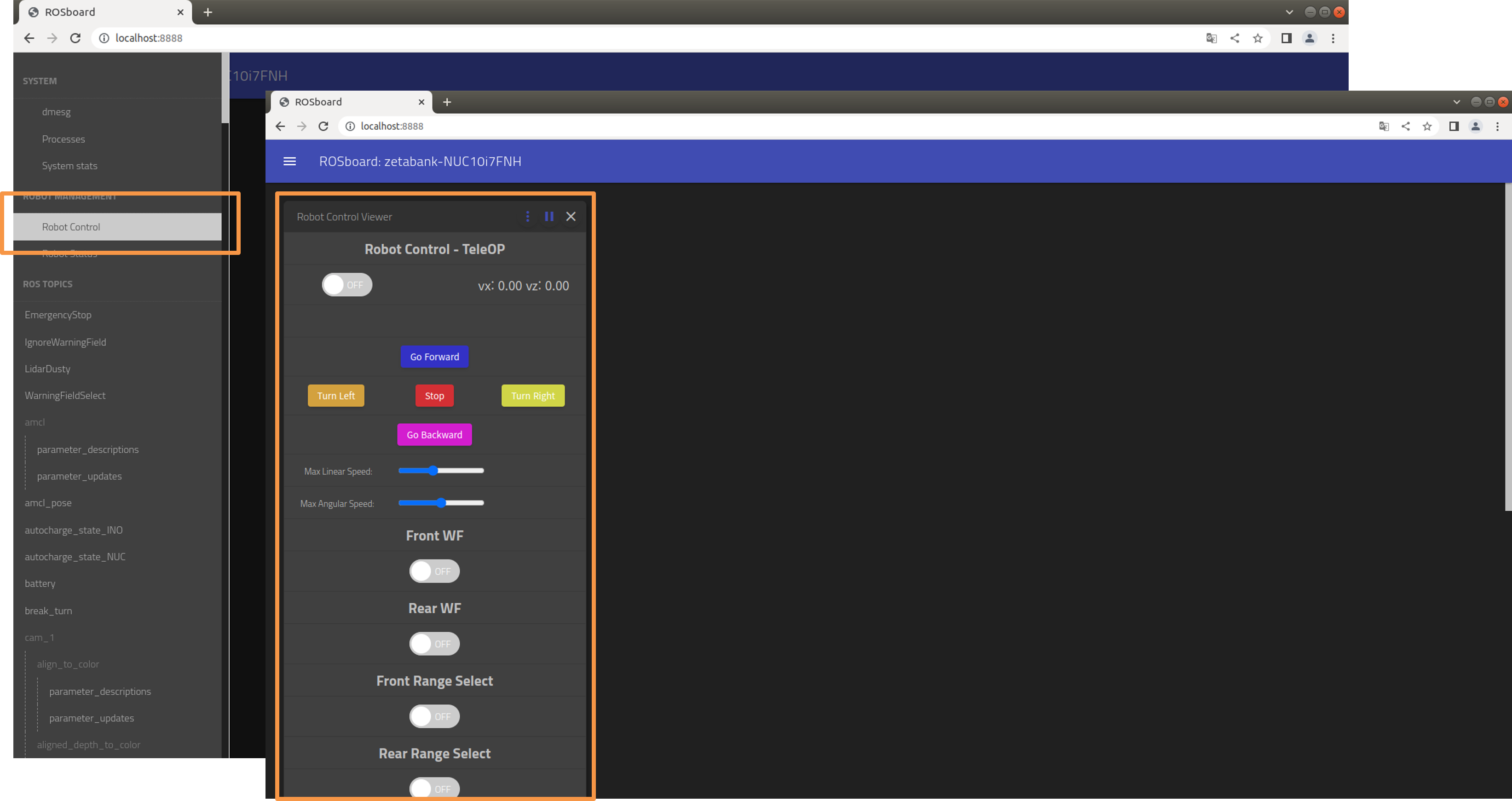
Left / Right / Forward / Backward / Stop
Linear velocity / Angular velocity
Safe area detection settings

Front, Rear lidar safety area detection settings
Front and Rear lidar safety area range selection
UVC
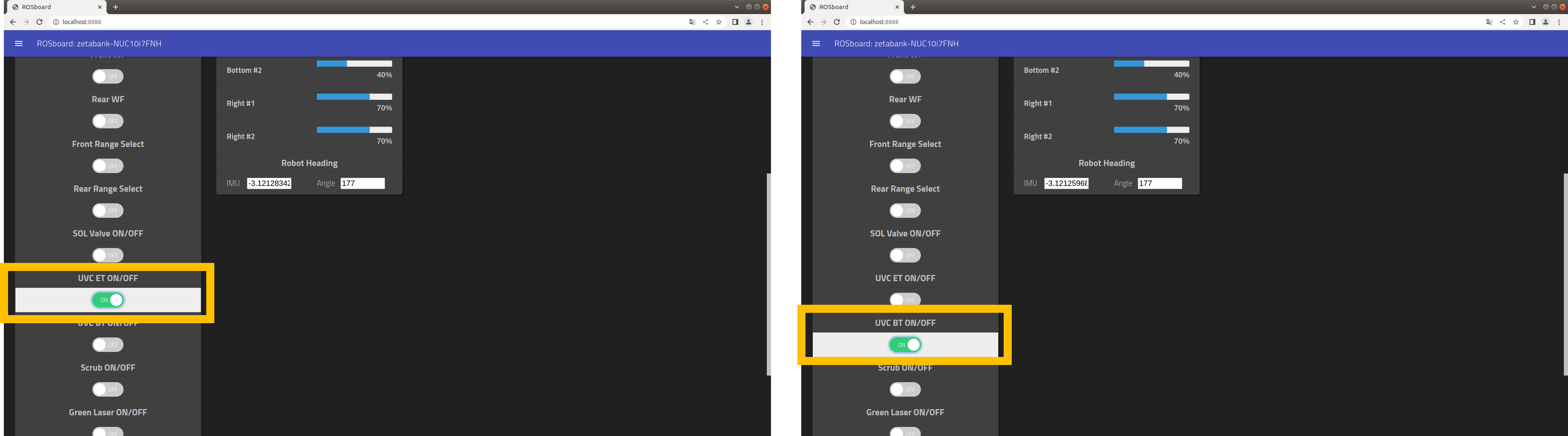
Endtool & Bottom UVC ON / OFF
Laser control
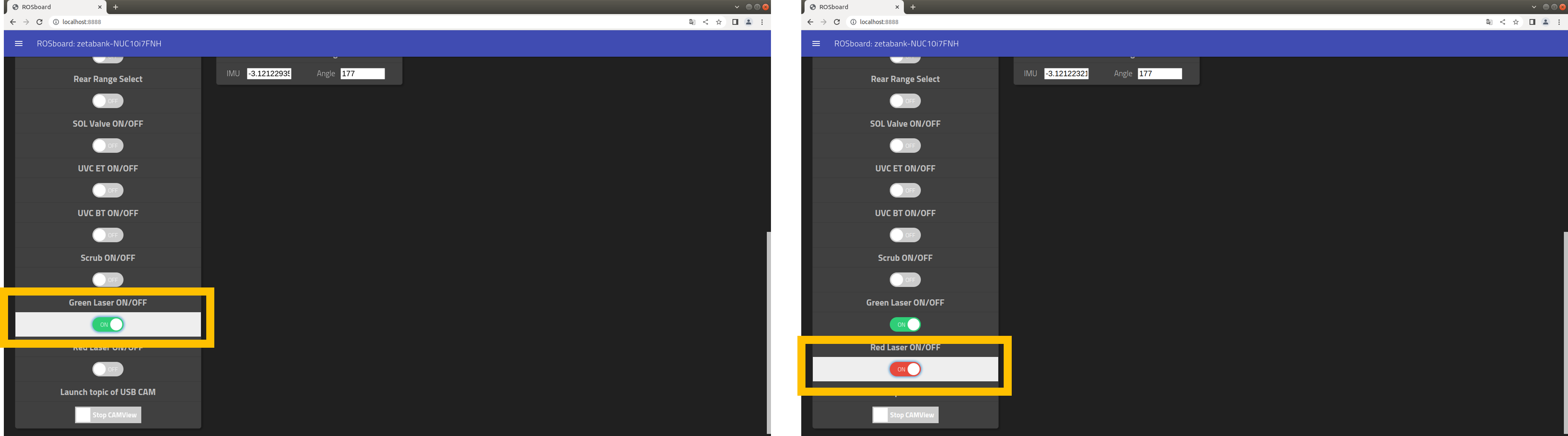
Green & Red laser ON / OFF
Sonar data
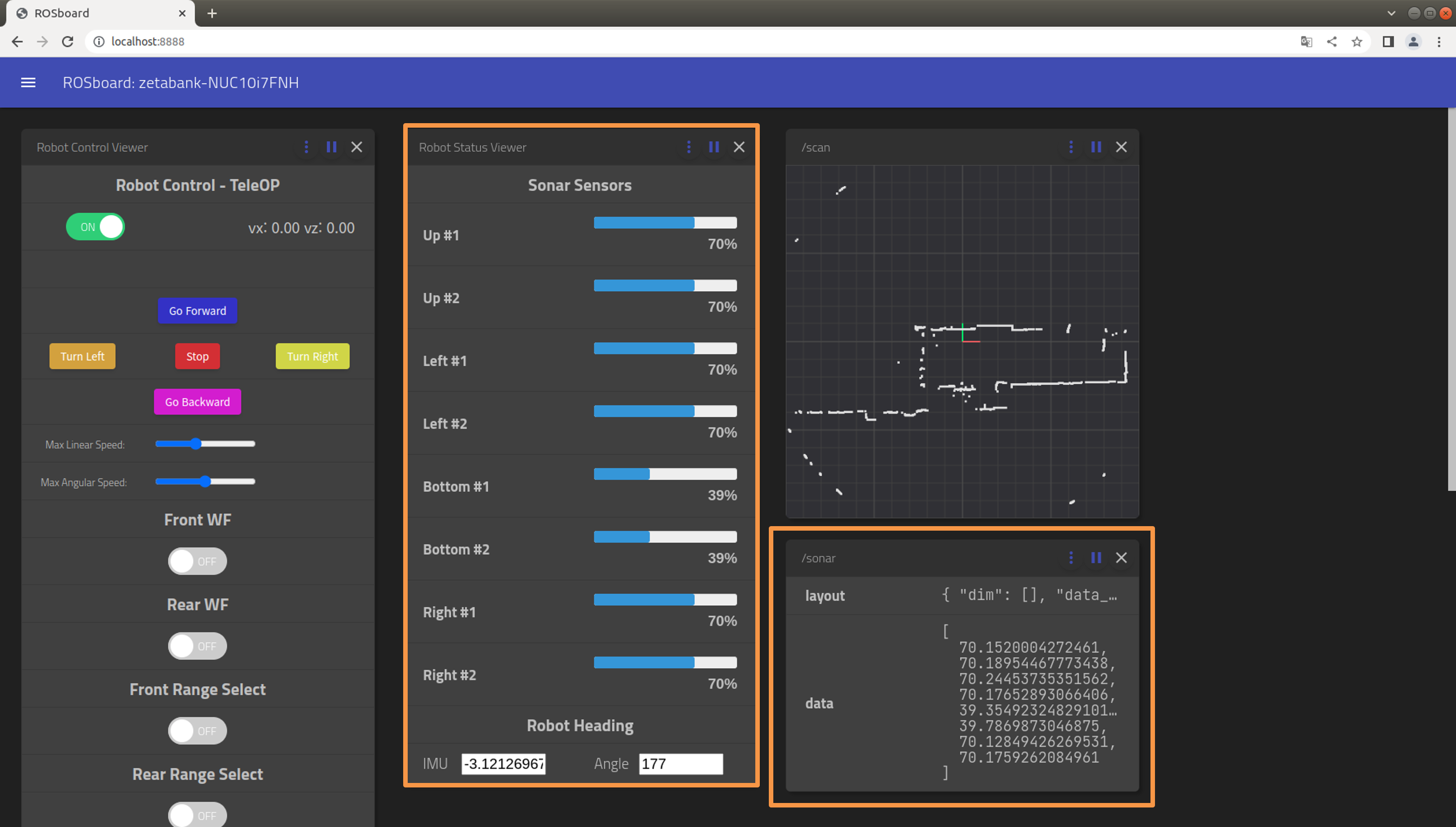
Sonar topic & Gauge bar output
Scan data

Scan data output received from lidar of the current robot
In addition to this, you can receive various types of topic data.