Algorithm
Fingerprint Recognition Position Adjustment Algorithm Using CAM
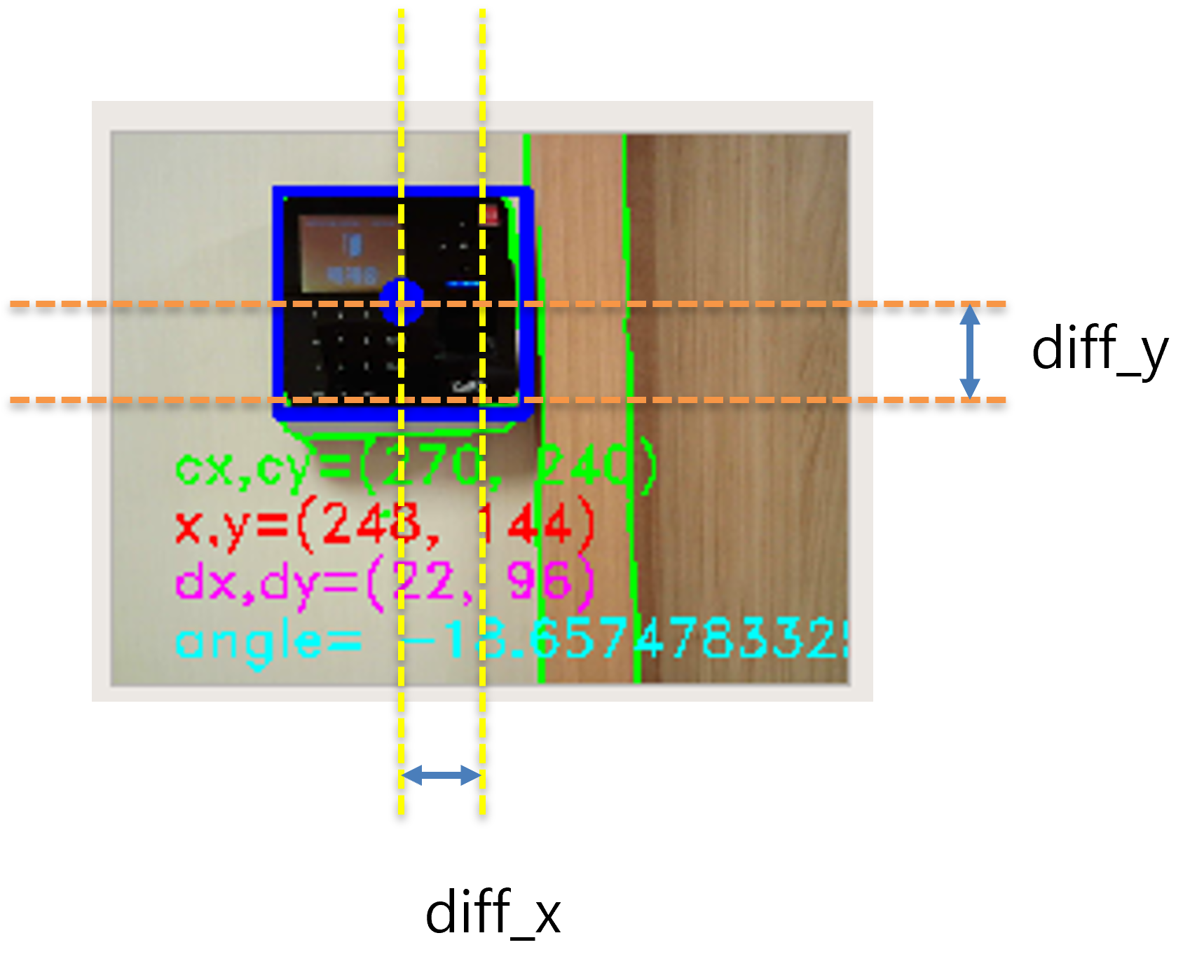
Center Coordinate Recognition
diff_x : Front/back distance value between the center of the screen and the center of the fingerprint reader
diff_y : Top/bottom distance value between the center of the screen and the center of the fingerprint reader
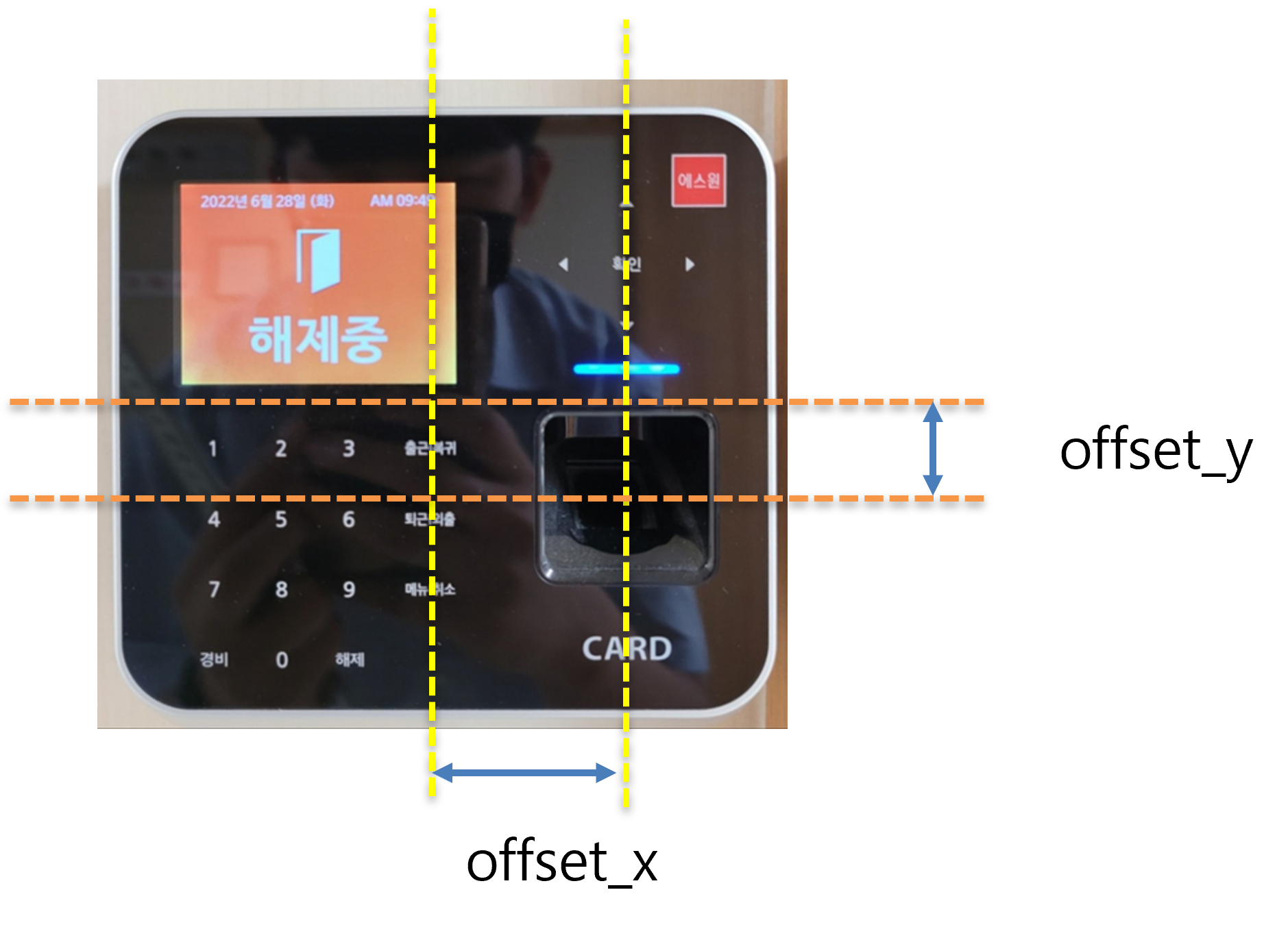
Offset Coordinate Calculation
offset_x : Front/rear distance value between the center of the screen and the center of the fingerprint recognition sensor
offset_y : Upper/lower distance value between the center of the screen and the center of the fingerprint recognition sensor
Rot_theta : rotation angle value of the coordinates of the center of the fingerprint reader from the center of the screen

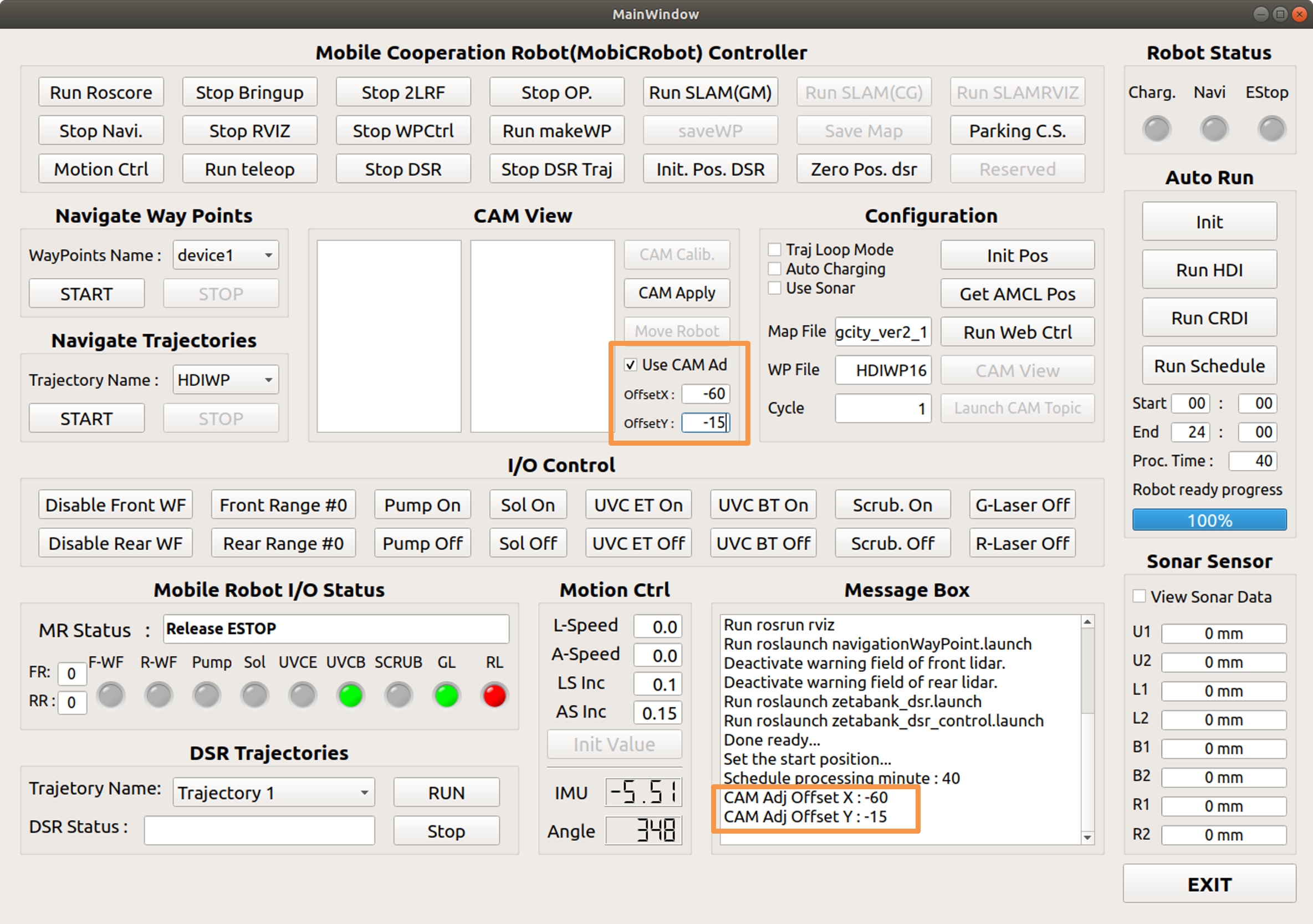
Set Offset Value
offset_x : Modify forward/backward offset value of the camera-based positioning algorithm
offset_y : Modify up/down offset value of camera-based positioning algorithm
Algorithm
Move the robot arm to a specific position to apply the recognition algorithm
Camera image capture
Change camera color information, convert to gray image
Apply various filters and image outline extraction algorithms to extract the rectangle outside the fingerprint reader
Extracting the outline of the fingerprint reader and acquiring the center coordinates
Offset x, y coordinate setting
Calculate the difference between the center coordinates of the camera and the current center coordinates of the fingerprint reader
Calculate the difference value (x, y axis) by applying offset coordinates to this difference value
First, move the robot forward/backward so that the x-axis difference value is less than a specific value (10, adjustable)
Calculate the difference value in real time and stop moving when it falls below a certain value
In a similar way to the above, move up/down so that the y-axis difference value is less than a specific value (using a robot arm)
Calculate the difference value in real time and stop moving when it falls below a certain value
Move the robot arm to the fingerprint reader proximity position
Calculation of camera center coordinates and rotation angle value of fingerprint reader center
Rotate the end of the robot arm in the opposite direction of the rotation angle using the robot arm
Proceed to the next step after completing the fingerprint reader position adjustment algorithm